autonomous robot
me218b course project
technology: HC12 microprocessor
dimensions: 12" L x 12" W x 12" H
date: february-march 2004
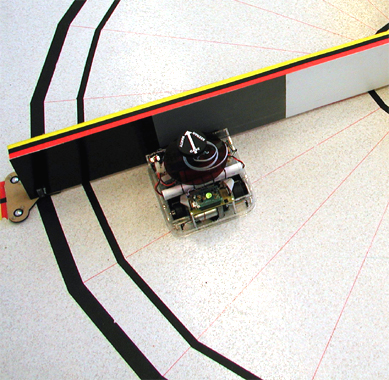
Here, you can see the circular playing field, as our robot pushes on
one of its neighboring walls, enlarging our pie area. If an opposing
robot pushes on the same wall, our robot detects
their presense by increased motor current requirements, and drops to
a low-speed, high-torque mode to overpower the competitors' robot.