autonomous robot
me218b course project
technology: HC12 microprocessor
dimensions: 12" L x 12" W x 12" H
date: february-march 2004
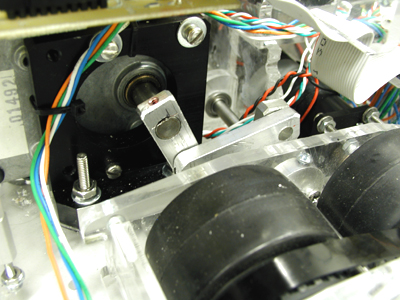
To switch between the two transmission speeds, a powerful geared-down motor was used to drive a
four-bar linkage, which rotated a shaft that ran through the width of the robot connecting both
transmission assemblies. The photo here shows three of the aluminum bars linkages, partially
hidden by one of the transmission assemblies.